WaBis
walter.bislins.ch
Method to calculate the Radius of the Earth from 3 Points
This page describes how the measured radius of the earth R3pt in the GNSS Data Viewer and the Geo-Data Visualisation and Calculator App is calculated. The two calculation variants on this page differ by the calculated plane in which the circle given by 3 points is computed. The Geo-Data Visualisation and Calculator App currently only uses the method Plane defined by the Perpendiculars at 2 Points.
Notation: On this page I notate vectors by bold letters like
Plane through Center of the Earth
Given three 3D points
Plane defined by the Perpendiculars at 2 Points
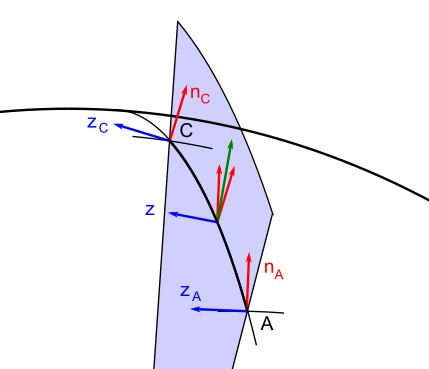 Construction of Arc Plane
Construction of Arc Plane
Given three 3D points
In the figure the green vector is the normalized vector sum of
Note: The center of the earth lies normally not on this plane but is nearby.
Problem with 3D Points
To find the center of a circle defined by 3 points, all points must lay on the same plane. The plane is calculated so that the points
Most of the calculations are the same for both plane variants. The only difference is how the local coordinate system of the plane is calculated. For the origin of the plane in both variants the point
a) Plane through the Center of the Earth
First we define the plane by a local coordinate system with the origin at
| (1) |
The hat above the variables like
b) Plane defined by the Perpendiculars at 2 Points
First we calculate the perpendicular vector
The X-axis direction is then perpendicular to
Lets calculate some intermediate vectors:
| (2) |
Now we can calculate the plane coordinate system:
| (3) |
Common calculations

Now we transform
| (4) | |
The center of the circle lies on the two perpendiculars through the middle points between A'-B' and B'-C'. The middle points can be calculated by adding the vectors and scale it by a factor 1/2:
| (5) |
The direction of the perpendiculars through
| (6) |
Rotating by 90° counter clockwise using the function
| (7) |
Now we can describe the equations for the two middle perpendicular lines. The center of the circle is the intersection of the two lines:
| (8) |
Because each vector in the equation (8) has 2 components, we have 2 equations for the unknown factors a and b.
| (9) | |
We only need one of this factors to calculate the center of the circle on the plane. We can solve both equations (9) for a and subtract the results. This gives us one equation for the unknown b. Solving for b gives:
| (10) |
We can now insert b into (8) and get the center of the circle in plane coordinates:
| (11) |
The radius of the circle is the length of the vector from
| (12) |
The center of the circle in the original 3D coordinate system can be calculated as follows:
| (13) |
JavaScript Code
CircleFrom3PointsAndNormals: function( A_3d, B_3d, C_3d, NA_3d, NC_3d ) {
// returns { R: radius, Center: [ x, y, z ] } coords in ECEF
//
// if NA_3d and NC_3d are defined, then
// the circle plane is such that A and B lie on the plane
// and the plane normal is calculated from the ellispoid perpendicular vectors NA_3d, NC_3d
// such that the plane lies between this vectors.
// else
// the plane is defined by the points A_3d, B_3d, and the center of the earth
// calculate plane local coord sys
var x, y, z;
if (V3.Ok(NA_3d) && V3.Ok(NC_3d)) {
// the circle plane is such that A and B lie on the plane
// and the plane normal is calculated from the ellispoid perpendicular vectors NA_3d, NC_3d
// such that the plane lies between this vectors.
// This is due to the fact that this vectors may be angled perpendicular to the connection of A and C
var D_3d = V3.Norm( V3.Sub( C_3d, A_3d ) );
var na = V3.Norm( V3.Mult( NA_3d, D_3d ) );
var nc = V3.Norm( V3.Mult( NC_3d, D_3d ) );
z = V3.Norm( V3.Add( na, nc ) );
x = V3.Norm( V3.Mult( D_3d, z ) );
y = V3.Mult( z, x );
} else {
// circle plane contains the center of the earth
z = V3.Norm( V3.Mult( A_3d, C_3d ) );
x = V3.Norm( A_3d );
y = V3.Mult( z, x );
}
// transform points into plane coord system
var B0_3d = V3.Sub( B_3d, A_3d );
var C0_3d = V3.Sub( C_3d, A_3d );
var A = [ 0, 0 ];
var B = [ V3.ScalarProd( B0_3d, x ), V3.ScalarProd( B0_3d, y ) ];
var C = [ V3.ScalarProd( C0_3d, x ), V3.ScalarProd( C0_3d, y ) ];
// calculate mid points
var Ma = V2.Scale( V2.Add( A, B ), 0.5 );
var Mb = V2.Scale( V2.Add( B, C ), 0.5 );
// calculate middle perpendicular directions
var ra = V2.Norm( V2.Sub( B, A ) );
var rb = V2.Norm( V2.Sub( C, B ) );
// rotate counter clockwise
var sa = [ -ra[1], ra[0] ];
var sb = [ -rb[1], rb[0] ];
// equations of middle perpendiculars are:
// Z = Ma + a * sa = Mb + b * sb
// solve for b (or a)
var b = (sa[0] * (Mb[1] - Ma[1]) - sa[1] * (Mb[0] - Ma[0])) / (sb[0] * sa[1] - sb[1] * sa[0]);
// center of circle on plane
var Z = V2.Add( Mb, V2.Scale( sb, b ) );
// radius of circle
var R = V2.Length( V2.Sub( A, Z ) );
if (b < 0) R *= -1;
// transform center to 3D
var Z0_3d = V3.Add( V3.Scale(x, Z[0]), V3.Scale(y, Z[1]) );
Z_3d = V3.Add( Z0_3d, A_3d );
return { R: R, Center: Z_3d };
}